
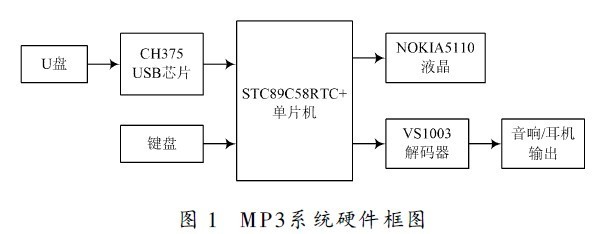
通过光电编码器,连续输入到单片机。接线完成后,可以通过单片机的程序读取旋转编码器的输出信号,从而确定旋转角度和方向。样本数量取决于您购买的编码器类型,然后您可以用单片机记录它。单片机主要由定时器定时,脉冲输出直接接单片机IO,在程序中计算单位时间内的脉冲数,从而得出转速。
单片机处理随机跳变的较好方案是跳变引起一次中断,然后在中断程序中作出判断后加入时钟。同时,计数器用于计数光电编码器的脉冲数,每当计时时间到来时读取计数器的脉冲数。您可以将A直接连接到MCU中断,并在中断期间根据B判断它是正还是负。定时扫描不一定足够准确(当然你的单片机超快,另当别论)。您应该使用计数器来计数脉冲数,定期“查看”计数次数,然后将其转换为角度。
因为单片机对两个脉冲的计数只能基于脉冲上跳(或下跳,下同)的处理。你需要在A端和B端分别连接一个电阻。电阻器上端的电压由您的电路决定:由单片机连接。此外,这两个脉冲信号通常通过D触发器来判断电机转向。需要注意的是,增量式旋转编码器的输出信号是一个脉冲信号,需要对其进行计数和处理才能得到实际的旋转角度。
光电编码器一般采用四线制,带数字输出。电源、接地、信号A和信号B和AB相差半个脉冲,以识别正旋转和负旋转。不要“数”其中一个信号(它似乎被称为Z),用它来申请中断,因为它是每圈才出现的脉冲。连接PLC后使用非常方便。检测a和b信号意味着(检测脉冲数;(A、B谁在前面?谁在后面?数数。中断处理需要时间。
感谢您的来访,获取更多精彩文章请收藏本站。
© 版权声明
THE END







暂无评论内容